Overview
An electrical motor is a device that has brought about one of the biggest advancements in the fields of engineering and technology ever since the invention of electricity. A motor is nothing but an electro-mechanical device that converts electrical energy into mechanical energy. It’s because of motors, life is what it is today in the 21st century.
Without the motor, we had still been living in Sir Thomas Edison’s Era where the only purpose of electricity would have been to glow bulbs. In simple words, we can say a device that produces rotational force is a motor. The very basic principle of functioning of an electrical motor lies in the fact that force is experienced in the direction perpendicular to the magnetic field and the current when field and current are made to interact with each other.
Ever since the invention of motors, a lot of advancements have taken place in this field of engineering and it has become a subject of extreme importance for modern engineers. This particular webpage takes into consideration, the fact as mentioned above and provides a detailed description of all major electrical motors and motoring parts being used in the present era.
History of Motor
In the year 1821 British scientist Michael Faraday explained the conversion of electrical energy into mechanical energy by placing a current-carrying conductor in a magnetic field which resulted in the rotation of the conductor due to the torque produced by the mutual action of electrical current and field.
Based on his principal the most primitive of machines a DC (Direct Current) machine was designed by another British scientist William Sturgeon in the year 1832. But his model was overly expensive and wasn’t used for any practical purpose.
Later in the year 1886, the first electrical motor was invented by scientist Frank Julian Sprague. That was capable of rotating at a constant speed under a varied range of load and thus derived motoring action.
Classification or Types of Motor
The primary classification of motor or types of motor can be tabulated as shown below,

How an electric motor works
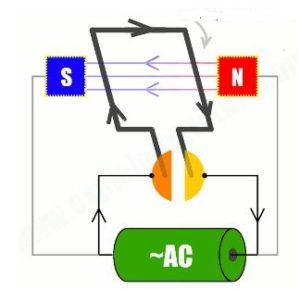
There are two ways to overcome this problem. One is to use a kind of electric current that periodically reverses direction, which is known as an alternating current (AC). In the kind of small, battery-powered motors we use around the home, a better solution is to add a component called a commutator to the ends of the coil.
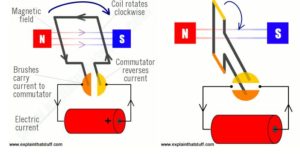
(Don’t worry about the meaningless technical name: this slightly old-fashioned word “commutation” is a bit like the word “commute”. It simply means to change back and forth in the same way that commute means to travel back and forth.) In its simplest form, the commutator is a metal ring divided into two separate halves and its job is to reverse the electric current in the coil each time the coil rotates through half a turn.
One end of the coil is attached to each half of the commutator. The electric current from the battery connects to the motor’s electric terminals. These feed electric power into the commutator through a pair of loose connectors called brushes, made either from pieces of graphite (soft carbon similar to pencil “lead”) or thin lengths of springy metal, which (as the name suggests) “brush” against the commutator. With the commutator in place, when electricity flows through the circuit, the coil will rotate continually in the same direction.
A simple, experimental motor such as this isn’t capable of making much power. We can increase the turning force (or torque) that the motor can create in three ways: either we can have a more powerful permanent magnet, or we can increase the electric current flowing through the wire, or we can make the coil so it has many “turns” (loops) of very thin wire instead of one “turn” of thick wire. In practice, a motor also has the permanent magnet curved in a circular shape so it almost touches the coil of wire that rotates inside it. The closer together the magnet and the coil, the greater the force the motor can produce.
Although we’ve described a number of different parts, you can think of a motor as having just two essential components:
- There’s a permanent magnet (or magnets) around the edge of the motor case that remains static, so it’s called the stator of a motor.
- Inside the stator, there’s the coil, mounted on an axle that spins around at high speed—and this is called the rotor. The rotor also includes the commutator.
Universal motors
DC motors like this are great for battery-powered toys (things like model trains, radio-controlled cars, or electric shavers), but you don’t find them in many household appliances. Small appliances (things like coffee grinders or electric food blenders) tend to use what are called universal motors, which can be powered by either AC or DC. Unlike a simple DC motor, a universal motor has an electromagnet, instead of a permanent magnet, and it takes its power from the DC or AC power you feed in:
- When you feed in DC, the electromagnet works like a conventional permanent magnet and produces a magnetic field that’s always pointing in the same direction. The commutator reverses the coil current every time the coil flips over, just like in a simple DC motor, so the coil always spins in the same direction.
- When you feed in AC, however, the current flowing through the electromagnet and the current flowing through the coil both reverse, exactly in step, so the force on the coil is always in the same direction and the motor always spins either clockwise or counter-clockwise. What about the commutator? The frequency of the current changes much faster than the motor rotates and, because the field and the current are always in step, it doesn’t actually matter what position the commutator is in at any given moment.